 Эти миниатюрные механические устройства, изготовление которых напоминает складывание оригами, в скором времени откроет новый способ автоматизации одного довольно трудоемкого процесса. Новейшая разработка инженеров из Гарварда вскоре сведет построение объемных конструкций, как, например, мини-роботов, к созданию многослойных плоских заготовок, а также их последующему сгибанию, и, естественно, фиксации уже готового продукта.
Эти миниатюрные механические устройства, изготовление которых напоминает складывание оригами, в скором времени откроет новый способ автоматизации одного довольно трудоемкого процесса. Новейшая разработка инженеров из Гарварда вскоре сведет построение объемных конструкций, как, например, мини-роботов, к созданию многослойных плоских заготовок, а также их последующему сгибанию, и, естественно, фиксации уже готового продукта.
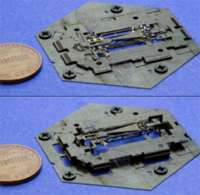
При помощи этой новой методики в лаборатории микророботики в Гарвардской школе машиностороения и прикладных наук уже был изготовлен прототип летающего робота-пчелы, который имеет массу всего 90 мг. Специально для этого было изготовлено 18 плоских фигурных «выкроек» из таких веществ, как углеволокно, пластик Kapton, титан, медь, керамика и клейкая пленка. В итоге, полученная наложением всех слоев структура состоит из 22 гибких «петли», которые позволяют собирать трехмерный продукт, высота которого 2,4 миллиметра всего лишь одним движением.
Кстати, что касается прежней сборке мини-роботов, которая осуществлялась непосредственно вручную и под микроскопом, то здесь человеческий фактор, а также сопряженные с этим ошибки исключаются полностью. К тому же, вмешательство человека теперь ограничивается стадией компьютерного проектирования и «раскроя» данной конструкции.
Новейшая технология позволяет изготовлять на одном листе композита огромное количество этих микророботов. Кроме этого, она также основывается на методике, которая довольно широко применяется в промышленности, например, для получения многослойных печатных плат. Интеграция в механическую конструкцию электронных схем вскоре станет естественным расширением процесса различного производства. Точно так же технология вполне может использоваться для массового выпуска коммутаторов, а также прочих высокоинтегрированных электромеханических устройств.

